Projects
- We implemented k-PRM for front-end path searching and an iterative method for back-end corridor-based trajectory optimization.
- My main contribution is implementing adjacent-list graph, A* graph search algorithm, and optimizing time consumption for trajectory optimization method.
|  |
- We designed a model predictive controller for UAV so that it can avoid obstacles. Specifically, we designed terminal cost and terminal set for cost function, added observer to predict unknown disturbance and strictly prove the asymptotic stability of the system.
- My main contribution is setting up the dynamics of quadrotors, designing the luenberger observer and executing numerical experiments.
|  |
Sensor fusion for pedestrian detection and tracking
- I designed two methods for pedestrian detection and tracking using monocular camera and using the fusion between LiDAR and stereo camera.
- In the method of monocular camera, I make some assumptions about the relative position between camera and ground, generate 3D region proposals accordingly, and apply a pre-trained pedestrian classifier to identify pedestrians. In the method of sensor fusion, I apply DBSCAN clustering to the point cloud to give more accurate region proposals and then apply a pedestrian classifier here.
|  |  |
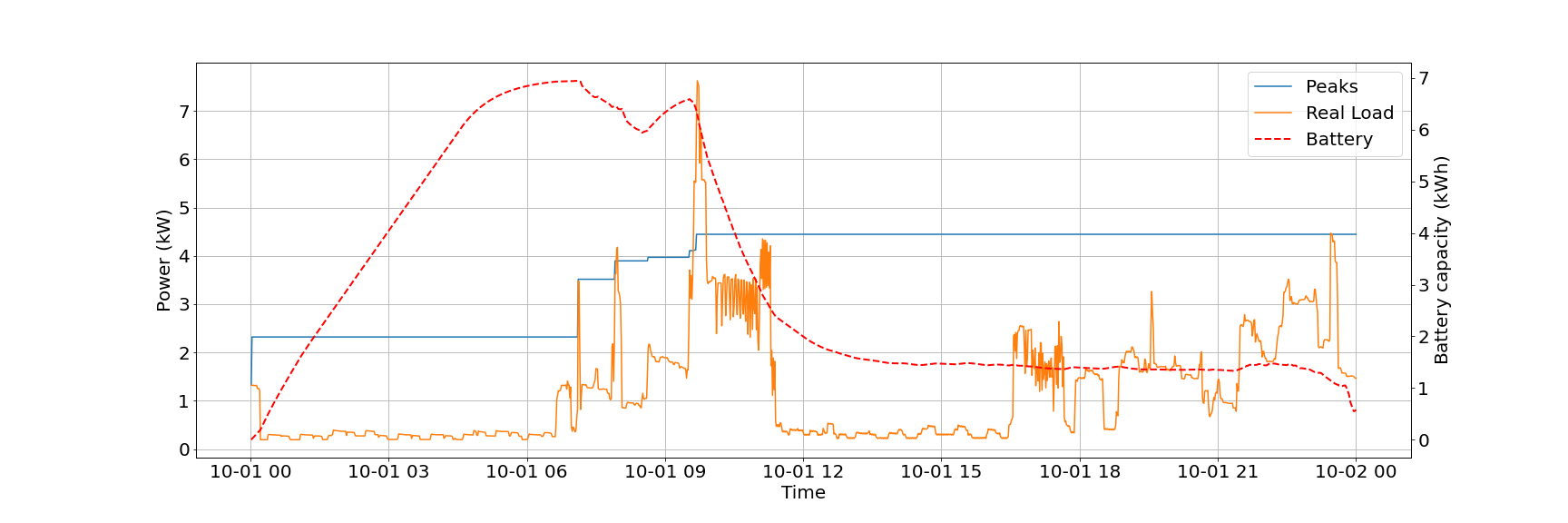
- We designed a stochastic controller to solve peak shaving problem with dynamic programming. Specifically, we discretize the state space and action space and model the system into a Markov chain. Then we solve the dynamic programming given a time horizon to minimize the cost.
- My main contribution is modeling the system dynamics into a markov chain and deriving the optimal control policy for the problem.
- We achieved grade 9.5/10 for this course project, one of the top groups.