Deep reinforcement learning(2): Actor-Critic
1. 从策略梯度到Actor-Critic
上一章介绍了策略梯度的基本思想,最后得到的更新梯度的步骤可以写成如下形式: \[ \nabla_{\theta} J(\theta) \approx \frac{1}{N} \sum_{i=1}^{N} \sum_{t=1}^{T} \nabla_{\theta} \log \pi_{\theta}\left(\mathbf{a}_{i, t} \mid \mathbf{s}_{i, t}\right)\left(\mathbb{r}(\tau)-b\right) \] 这里的问题是 \(r(\tau)\) 这一项是通过蒙特卡罗方法从 \(\pi_\theta(a|s)\) 中采样得到的,如果我们希望agent在与环境交互一次后就进行一次参数的优化,这里得到的梯度则只能根据单个样本计算,即得到一条轨迹后就代入上面的式子计算梯度,这样得到的结果很显然会有很大的方差。
为了解决这个问题,在Actor-Critic算法中,我们用Q函数来代替 \(r(\tau)\),并且创建Critic网络来拟合Q函数。这样我们将梯度重新写成: \[ \nabla_{\theta} J(\theta) = \frac{1}{N} \sum_{i=1}^{N} \sum_{t=1}^{T} \nabla_{\theta} \log \pi_{\theta}\left(\mathbf{a}_{i, t} \mid \mathbf{s}_{i, t}\right)\left(Q_{\theta}(\mathbf{a}_{i, t}, \mathbf{s}_{i, t})\right) \] Critic函数最后训练的目标是让 \(Q_{\theta}(\mathbf{a}, \mathbf{s})\) 接近 \(\mathbb{E}_{\theta}\left[r(\tau)\right]\),直观上理解就是我们通过已经收集到的reward拟合出一个函数来评估当前状态的好坏。和之前直接用每条轨迹的reward相比,这种方法保留了历史reward的信息,因此更加可靠。
这里我们还没有讨论具体该如何训练Critic网络。事实上在之后的推导中我们将会用监督学习来训练Critic网络,具体如何实现以及监督学习的训练集如何生成会在下一节里提到。
2. 从AC到A2C
基本的AC算法中我们在Critic网络中需要以state和action作为输入,输出Q函数。这样会带来两个问题:1.方差仍然很大;2.输入维度大(包括状态输入 \(s\) 和动作输入 \(a\)),训练困难。为了解决这些问题我们对AC算法进行一些改进。
2.1 引入基线
首先和Policy gradient里一样,我们同样可以通过引入基线的办法来减小方差。这里的基线可以直接定义为给定状态情况下的价值函数 \(V_\theta(s)\)。与 \(Q_\theta(a,s)\) 相比,价值函数还没有对当前状态做出动作的选择,因此可以被当做是平均之后的 \(Q(a,s)\) 函数。引入价值函数作为基线后,梯度可以重新被写成:
\[ \nabla_{\theta} J(\theta) = \frac{1}{N} \sum_{i=1}^{N} \sum_{t=1}^{T} \nabla_{\theta} \log \pi_{\theta}\left(\mathbf{a}_{i, t} \mid \mathbf{s}_{i, t}\right)\left(A_{\theta}(\mathbf{a}_{i, t}, \mathbf{s}_{i, t})\right) \]
其中 \(A_{\theta}(a_t,s_t)\) 函数我们定义为优势函数: \[ \begin{aligned} A_{\theta}(a_t,s_t)&=Q_{\theta}(a_t,s_t)-V_{\theta}(s_t) \end{aligned} \]
事实上,这里的基线我们只需要选择一个与当前动作无关的函数,我们就能证明这里的梯度仍然是无偏估计。证明之后有空补上!
2.2 自助法采样(Bootstrapping)
这里改进的基本思想是:如果我们需要采样一条轨迹来拟合优势函数,那采样的方差会特别大。然而如果我们只采样下一步的状态,方差相比采样整条轨迹就会大幅减小。
\[ \begin{aligned} A_{\theta}(a_t,s_t)&=Q_{\theta}(a_t,s_t)&-V_{\theta}(s_t)\\ &=r(a_t,s_t)+\mathbb{E}_{s_{t+1}\sim p(s_{t+1}|a_t,s_t)}\left[V_\theta(s_{t+1})\right]&-V_\theta(s_t)\\ &\approx r(a_t,s_t)+V_{\theta}(s_{t+1})&-V_{\theta}(s_t) \end{aligned} \]
在这样近似之后,由于reward函数已知,我们只需要对价值函数进行拟合就能推算出优势函数。这样输入维度就只有状态变量了,大大节省了训练难度。
2.3 生成训练集
到此为止我们确定了我们需要拟合的函数就是价值函数 \(V(s_t)\),前文中提到,我们将会用监督学习的方法来拟合价值函数。即定义损失函数:\(\mathcal{L}(\theta)=\frac{1}{2}\sum_i||V_\theta(s_i)-y_i||^2\) ,同时收集训练集:\(\left\{ s_i, y_i \right\}\) 来优化损失函数。如何生成训练集就是我们接下来要讨论的问题。
2.3.1 蒙特卡罗方法生成训练集
最直观的方法就是我们直接通过采样一整条轨迹作为训练集。这里假设我们是通过与实际环境进行交互得到的轨迹,在这种情况下我们通常无法“重置”一个状态,这就意味着我们将会只有单样本的训练集(对于一个状态 \(s\) 我们只能生成一次轨迹来预测状态 \(s\) 之后 \(N\) 步的回报,理想情况下由于策略具有不确定性,我们是希望能够多次从一个状态出发,得到之后 \(N\) 步的回报之后取平均值来减小预测的方差)。
利用蒙特卡罗方法得到的训练集可以写成:\(\left\{(s_{i,t}, \sum_{t'=t}^T r(s_{i,t'},a_{i,t'}))\right\}\)
2.3.2 自助法估计训练集
和之前一样,我们可以用自助法估计 \(t+1\) 时刻的状态,从而将累计回报近似为 \(R+V\) 的形式。(与之前不同的是这里我们是对 \(V\) 进行估计,在只有 \(s_t\) 的情况下我们事实上需要多估计一步 \(p_\theta(a_t|s_t)\),我认为这里事实上进行了两步Bootstrapping)。
\[ y_{i,t}=\sum_{t'=t}^T\mathbb{E}_\theta\left[r(s_{t'},a_{t'})\mid s_{i,t}\right]\approx r(s_{i,t},a_{i,t})+V_\theta(s_{i,t+1}) \]
这里的问题是即使我们拓展成这种形式,最根本的问题还是没有解决,我们不知道 \(V_\theta(s)\) 的值。这里的解决办法就是假设上一次迭代得到的 \(V_{\hat{\theta}}(s)\) 与这次的差距很小,我们直接拿上一次的价值函数作为这次的估计。很显然这是个 有偏估计,需要我们用其他实际的工程技巧来克服这个问题。
目前为止我们讨论的都是有限时间序列的情况,并且我们认为时间 \(t\) 是被计算到状态变量中的。假设我们现在需要解决无限时间序列,并且不考虑把时间 \(t\) 作为状态考虑。这种情况下由于我们不断在价值函数上加一步回报 \(r(s_{t},a_{t})\),如果单步回报的期望大于0,那拟合的价值函数就会随迭代次数增加而不断增加,无法收敛。为了解决这个问题我们引入类似贝尔曼方程里的折扣因子的概念: \[ y_{i,t}\approx r(s_{i,t},a_{i,t})+\gamma V_\theta(s_{i,t+1}) \] 至此我们就得到了完成的A2C算法流程。
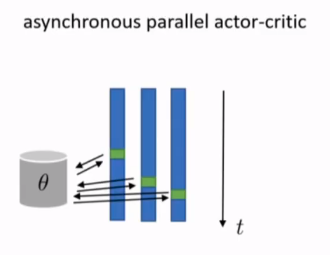
3. 从A2C到A3C
原理很简单:同时让多个actor与环境分别单独进行交互,将交互的结果存入缓冲区中总结reward后统一对参数进行更新。